



Zinātnieki no Hanianas Universitātes Seulā ir izveidojuši maziņus un jaukus robotus-skudras, kas strādā vienkopus, lai pārvietotu lietas un veiktu citus darbus līdzīgi kā īsti kukaiņi.
Mikrorobotu pūļi pilda uzdevumus, piemēram, transportē priekšmetus un attīra caurules, izmantojot magnētiskos laukus. Iedvesmojoties no skudrām, šie roboti varētu tikt izmantoti medicīnā, bet tiem ir jāpilnveido autonomija. Roboti strādā kopā un paveic patiesi iespaidīgus darbus – šķērso un pārvieto objektus, kas daudzkārt pārsniedz to pašu izmēru.
Saskaņā ar pētījumu, kas publicēts žurnālā Device, roboti darbojas ar griežamā magnētiskā lauka palīdzību un veic sarežģītus uzdevumus, kas būtu grūti vienam robotam. To pielietošanas potenciāls ietver minimāli invazīvu aizsērējušo artēriju ārstēšanu un precīzu bioloģisko paraugu pārvietošanu sarežģītos apstākļos.
«Augsta mikrorobotu pūļu pielāgojamība videi un augsts autonomijas līmenis pūļa kontrolei bija negaidīti», saka pētījuma autors Čon Dže Vi.
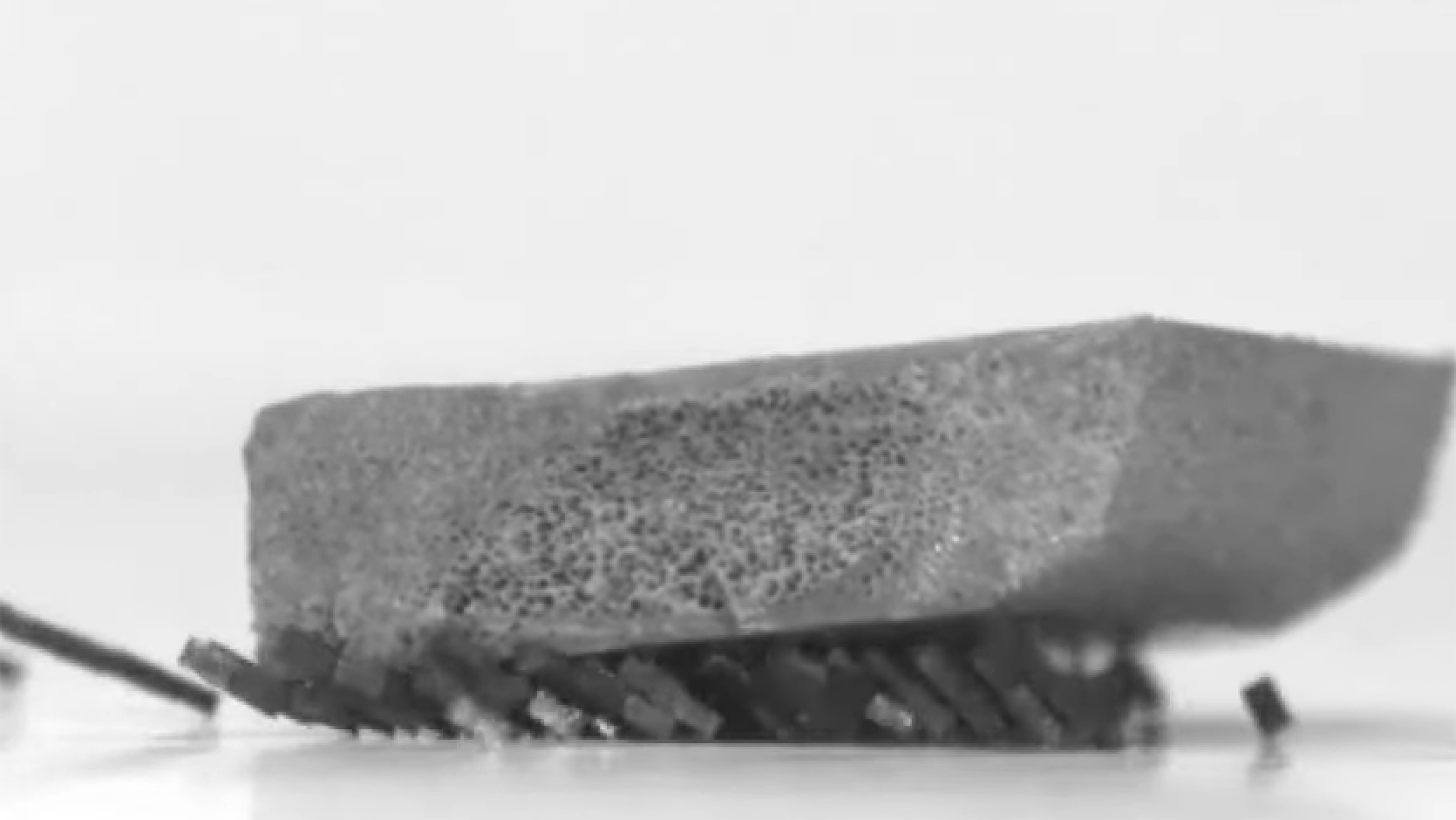
Pūlis spēj uzrāpties šķērslim, kas piecas reizes pārsniedz viena mikrorobota garumu. Liels, no 1000 robotiem sastāvošs pūlis veidoja plostu, kas peldēja ūdenī un aptvēra tableti, kas bija 2000 reižu smagāka par katru atsevišķu robotu, un spēja transportēt medikamentus šķidrumā.
Uz sauszemes pūlis spēja pārvietot kravu, kas bija 350 reizes smagāka par vienu robotu, kā arī attīrīt caurules, kas atgādināja bloķētus asinsvadus. Pētnieku komanda izveidoja sistēmu, ar kuras palīdzību pūlis varēja vadīt mazo organismu kustības.
Agrākie pētījumi par pūļu robotiku bija koncentrēti uz sfēriskiem robotiem, kas savienojas caur "punkts-uz-punktu" kontaktu. Šajā pētījumā zinātnieki izveidoja pūli, kas sastāv no kubveida mikrorobotiem, kam ir spēcīgāka magnētiskā pievilcība lielākas virsmas laukuma dēļ.
Katrā robotā ir 600 mikrometru augstums un tas sastāv no epoksīdķermeņa ar ferromagnētiskā neodīma, dzelzs un bora (NdFeB) daļiņām, kas ļauj tam reaģēt uz magnētiskajiem laukiem un mijiedarboties ar citiem. Roboti tiek darbināti ar magnētisko lauku, kas veidojas no divu savienotu magnētu rotēšanas, un tas ļauj pūlim pašam sevi savākt. Pētnieki ir programmējuši robotus, lai tie savienotos dažādās konfigurācijās, mainot leņķi, zem kura tie tiek magnētizēti.
«Mēs esam izstrādājuši ekonomisku masu ražošanas metodi, izmantojot kopēšanas un magnētisko pielietojumu uz vietas, nodrošinot vienādu ģeometriju un magnētiskuma profilus stabilai veiktspējai. ... Lai gan pētījuma rezultāti ir daudzsološi, pūļiem būs nepieciešams labāks autonomijas līmenis, pirms tie būs gatavi lietošanai reālajā pasaulē», saka Vi.
Tā kā magnētisko mikrorobotu pūļiem ir nepieciešama ārēja magnētiska kontrole, tiem trūkst spējas autonomi pārvietoties sarežģītās vai ierobežotās telpās, kā īstās artērijas. Turpmākie pētījumi pievērsīsies autonomijas uzlabošanai, kā arī to kustību un trajektoriju atgriezeniskās saites kontrolei reālā laikā.
Avots: SciTechDaily





Komentāri (0)
Šobrīd nav neviena komentāra